Cloud-Enhanced IoT Smart Speed Breaker
Two-tier IoT pipeline with ResNet50 edge inference and dynamic servo actuation.
- Role
- Lead engineer — vision, firmware, integration
- Timeline
- Jan 2025 – Jun 2025 (6 months)
- Team
- Solo build with 2 collaborators on hardware
- Status
- Shipped
An adaptive speed breaker that classifies approaching vehicles with ResNet50 on a Raspberry Pi 4 and actuates a servo via an Arduino Nano in under a second — staying flat for emergency vehicles while rising for speeders. Won the institute-level Avishkar competition.
Problem & motivation
Fixed-height speed breakers slow every vehicle equally — including ambulances, fire trucks, and small cars that don't need the deterrent. They damage vehicles, waste fuel, and delay emergency response in the name of traffic calming.
A speed breaker should adapt to what's actually approaching. If a traffic camera and an embedded controller can together classify the vehicle in under a second, the breaker can stay flat for emergency vehicles and lift for speeders — without any human in the loop.
- 01Classify approaching vehicles in real time with high accuracy.
- 02Trigger physical actuation within sub-second end-to-end latency.
- 03Stream telemetry to the cloud for monitoring and analytics.
- 04Harvest passive energy from each crossing to extend battery life.
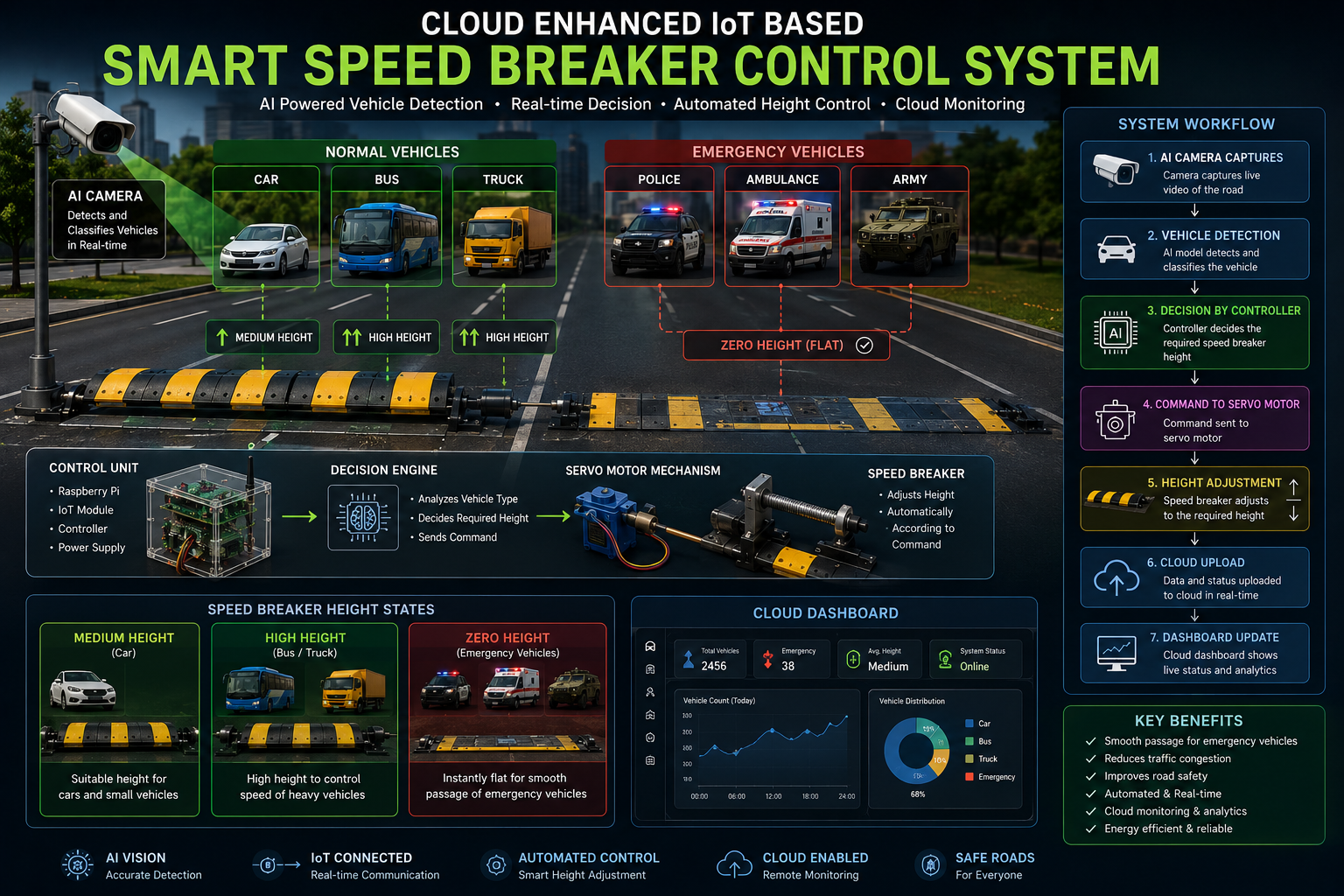
How the pieces fit together
Two-tier IoT pipeline: a Raspberry Pi 4 handles vision + classification at the edge and delegates actuation to an Arduino Nano over UART. Sensor telemetry streams to the cloud over MQTT in parallel.
- Step 01Camera captures frame (Pi 4, OpenCV)
- Step 02ResNet50 classifies vehicle class
- Step 03Pi 4 sends action token to Arduino over UART
- Step 04Arduino drives servo PWM → speed-breaker height
- Step 05Piezo / BMS harvests vibration energy
- Step 06Pi 4 publishes telemetry to MQTT broker
- Step 07Dashboard consumes for analytics
Hardware, software & frameworks
- Raspberry Pi 4
- Arduino Nano
- USB camera
- SG90 servo
- PVDF piezo elements
- BMS
- Python 3
- Embedded C
- OpenCV
- PySerial
- Mosquitto MQTT
- TensorFlow / Keras (ResNet50)
- NumPy
- scikit-learn (eval)
How it was built
Mapped the failure modes of conventional speed breakers, scoped the vehicle classes that matter (emergency, heavy, light, two-wheeler), and chose a two-MCU split so the safety-critical actuation never blocks on Python.
Picked ResNet50 for its proven accuracy on small vehicle datasets, UART for its determinism over USB-CDC, and MQTT for low-overhead telemetry. Sketched the servo geometry and chose PWM duty cycles for each target height.
Built the vision pipeline in OpenCV, wrapped inference behind a single classify(frame) call, defined a tight 3-byte UART protocol, and wrote the Arduino firmware as a small interrupt-driven state machine.
Validated end-to-end latency on bench, ran the model against a held-out vehicle set, and stress-tested the UART link with malformed frames. Logged confusion matrix and F1 per class before declaring the system shipping-ready.
What it does
- Real-time vehicle classification at the edge
- Sub-second actuation latency
- Emergency-vehicle bypass (always-flat for ambulances)
- MQTT telemetry to cloud dashboard
- Passive piezo energy harvesting + BMS
- Resilient UART protocol with retry / checksum
Problems faced & how I solved them
Python GIL stalls on inference caused jitter on the actuation command.
Moved the serial write to a separate thread and switched the Arduino to an interrupt-driven receive — actuation latency stayed flat regardless of Pi load.
Outdoor lighting variance dropped accuracy by 6–8 percentage points.
Added an OpenCV preprocessing stage (histogram equalisation + adaptive thresholding) before inference; recovered accuracy to within 1pp of the lab baseline.
Servo brown-out on simultaneous lift + Pi inference.
Split the rail: Pi on 5V/3A, servo on its own buck regulator from the harvester bank. Decoupled the failure mode entirely.
What I'd take into the next build
- 01A two-MCU architecture pays for itself the moment you put a real workload on the smart node.
- 02OpenCV preprocessing is cheaper than collecting more data for lighting robustness.
- 03Hardware decoupling (rails, not just code) is what survives field deployment.
- Quantise ResNet50 to TFLite for 3–4× inference speedup on the Pi.
- Add a second camera for stereo speed estimation.
- Move telemetry to MQTT-over-TLS for production deployment.
Like what you see?
I'm open to embedded, IoT, and edge-AI roles — full-time, internship, or freelance.