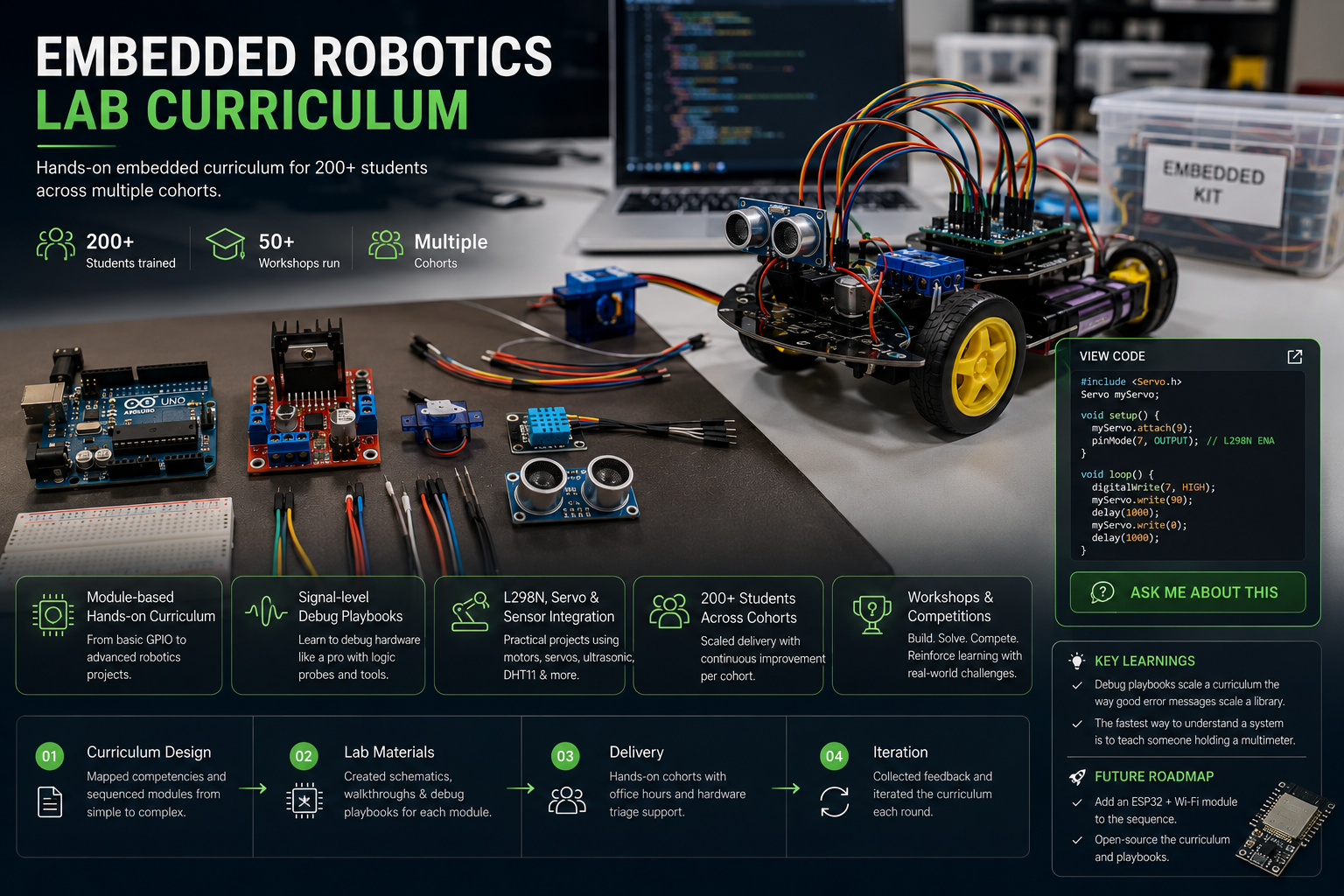
Embedded Robotics Lab Curriculum
Hands-on embedded curriculum for 200+ students across multiple cohorts.
- Role
- Curriculum designer & lead instructor
- Timeline
- 2024 – Present (ongoing)
- Team
- 1 lead + rotating TA cohort
- Status
- Ongoing
A module-based embedded-robotics curriculum that puts hardware in students' hands from day one, paired with signal-level debug playbooks. Delivered to 200+ students across multiple cohorts with 50+ workshop participants.
Problem & motivation
Most embedded-systems curricula are theory-first. Students arrive at their first project unable to wire a motor driver or read a logic-probe trace — and lose weeks recovering from that gap.
Build a lab curriculum that puts hardware in students' hands from day one, with debug playbooks that turn frustration into a repeatable diagnostic loop.
- 01Design lab projects covering GPIO, PWM, motor control, and sensing.
- 02Train students to debug at the signal level, not just the code level.
- 03Scale the curriculum to 200+ students across multiple cohorts.
- 04Run workshops and competitions that reinforce the lab work.
How the pieces fit together
Module-based curriculum: each module pairs a hardware kit (Arduino + driver + sensor) with a guided project and an open-ended extension. Debug playbooks layer over every module.
- Step 01Guided wiring exercise (with reference schematic)
- Step 02Firmware walkthrough — read, modify, extend
- Step 03Open-ended extension challenge
- Step 04Signal-level debugging session
- Step 05Mini-demo + peer review
Hardware, software & frameworks
- Arduino Uno / Nano
- L298N motor driver
- Servo motors
- Ultrasonic / IR / DHT11
- C / C++
- Arduino IDE
- Logic probe workflows
- Custom debug playbooks
How it was built
Mapped competencies students were missing, sequenced modules from simple GPIO to full motor + sensor integration.
Authored wiring diagrams, walkthroughs, and an explicit debug playbook for each module.
Ran cohorts hands-on with continuous office hours and a triage queue for hardware issues.
Collected pain points after each cohort and folded fixes back into the next round of materials.
What it does
- Module-based hands-on curriculum
- Signal-level debug playbooks per module
- L298N motor + servo + sensor coverage
- 200+ students across cohorts
- Workshops & competitions reinforcing the lab work
Problems faced & how I solved them
Inconsistent component quality across kits.
Standardised a per-cohort sanity-check script students ran on the bench before starting any module.
Debugging bottleneck during demo week.
Built a triage flowchart and trained TAs on it — cut average resolution time per ticket roughly in half.
What I'd take into the next build
- 01Debug playbooks scale a curriculum the way good error messages scale a library.
- 02The fastest way to understand a system is to teach someone holding a multimeter.
- Add an ESP32 + Wi-Fi module to the sequence.
- Open-source the curriculum and playbooks.
Like what you see?
I'm open to embedded, IoT, and edge-AI roles — full-time, internship, or freelance.